
Sample photos
Photography legitimately taken by iPhone. Content for stress purposes only.
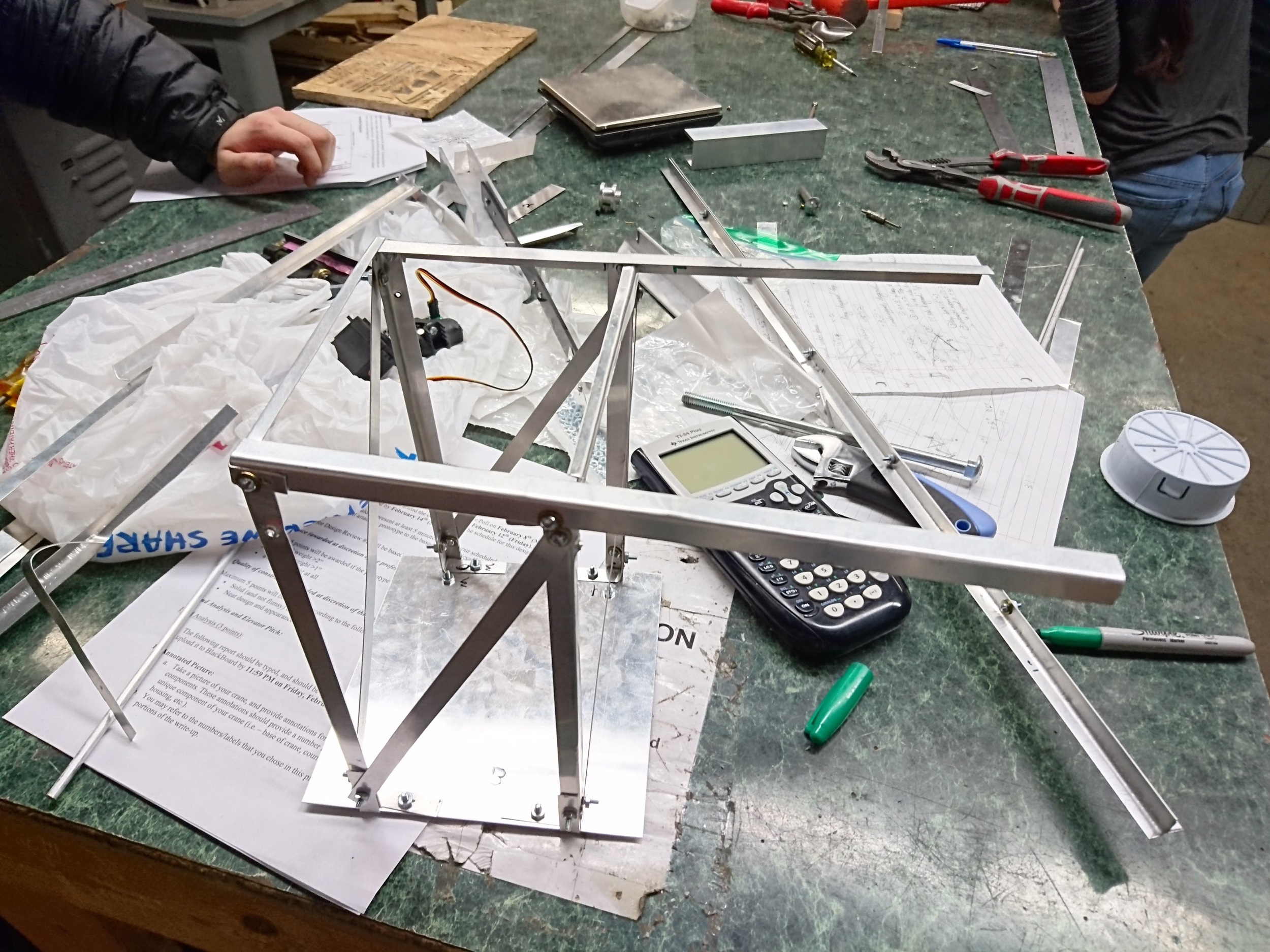
BASE
From Vancouver to Pittsburgh, we have come a long way to build a solid, minimalist base that is resistant to bending/twisting moment acting on the extended arm.

ARMs
As you can see, we totally didn't waste the extended arm that doesn't have any attachment to it. This is a design style decided by the fact that we don't have a long enough aluminum arm.

Forearm
With realistic design for our forearm attached to the motor, the chunk of aluminum that acts as the counterweight makes huge 10% contribution to our bending torque.













